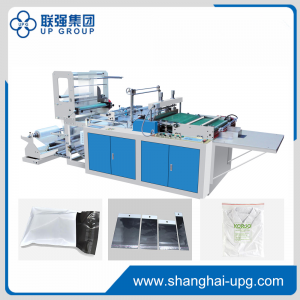
Spesifikasi
| Mod | tiga pengedap sisi, tujuh servo, empat penyuapan, servo mesin utama, potongan berganda boleh alih. Dengan peranti ultrasonik. |
| Bahan mentah | BOPP, CPP, PET, NILON, filem berlamina plastik, filem tiup penyemperitan berbilang pemain, aluminium tulen, filem berlamina penyaduran aluminium, filem berlamina kertas-plastik |
| Kelajuan pembuatan beg maksimum | 180 masa/min |
| Kelajuan biasa | 120 kali/min (tiga meterai sisi 100-200mm) |
| 4Max. kelajuan talian makan bahan keluar | ≤35 m/min |
| Saiz beg | |
| Lebar | 80-580 mm |
| Panjang | 80-500 mm (fungsi penghantaran berganda) |
| Lebar pengedap | 6-60 mm |
| Gaya beg | beg pengedap tiga sisi, beg berdiri, beg zip dan pengedap empat sisi |
| Saiz gulungan bahan | Ø 600*1250 mm |
| Ketepatan kedudukan | ≤±1 mm |
| Kuantiti pisau pengedap haba | Empat pasukan dalam pengedap haba menegak, empat pasukan dalam persediaan penyejukan menegak. Dua pasukan dalam pisau pengedap haba zip, dua pasukan dalam unit penyejukan. Tiga pasukan dalam pengedap haba mendatar, dua pasukan dalam persediaan penyejukan mendatar |
| Kuantiti kawalan suhu | 22 laluan |
| Julat tetapan kawalan suhu | normal dan sehingga 360℃ |
| Kuasa keseluruhan mesin | 45KW |
| Dimensi keseluruhan (panjang * lebar * tinggi) | 14100*1750*1900 |
| Berat bersih keseluruhan mesin | kira-kira 6500Kg |
| Warna | Badan mesin utama berwarna hitam, penutupnya berwarna putih susu. |
| Bunyi bising ≤75db | |
Pengedap tiga sisi
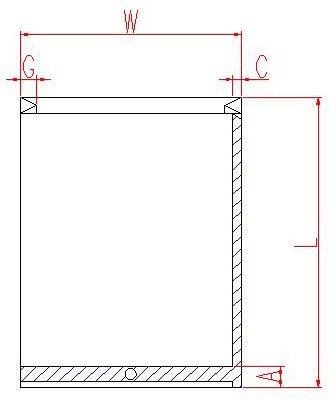
Pengedap empat sisi
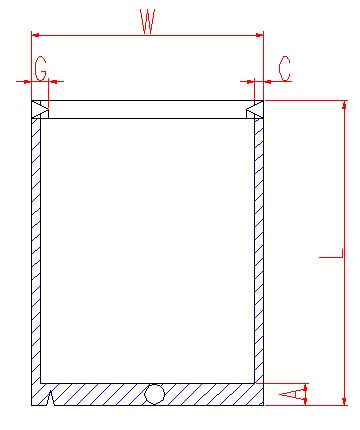
Pengedap empat sisi
Kantung berdiri
Beg berdiri dengan zip
Spesifikasi dan parameter yang berkaitan
| Peranti bingkai yang boleh dilonggarkan | |
| Struktur | struktur pembetulan ralat automatik tegak yang melonggarkan |
| Kawalan ketegangan | |
| Brek brek kuasa magnetik | |
| Struktur pemakanan keluar inisiatif | |
| Mod kawalan | penggelek tarian jenis terapung yang menyesarkan sensor mengawal kelajuan suapan keluar |
| Penggelek nip pengumpan tirus keluar yang dipasang ketat (dengan aci pengembangan udara) | |
| Kawalan pembetulan ralat (EPC) | |
| Struktur | pelarasan sekunder rod skru, mengangkat dan menjatuhkan rak K secara menegak |
| Pandu | Relay keadaan pepejal memacu motor segerak berkelajuan rendah |
| Penularan | sambungan gandingan aci keluli |
| Jenis kawalan | pengesanan transduser elektrik pantulan, kawalan bebas. |
| Ketepatan penjejakan | 0.5mm |
| Julat pelarasan | 150mm |
| Bahagian atas dan bawah yang bertentangan | |
| Struktur | struktur penekan spring hujung tunggal penggelek |
| Pelarasan | pelarasan manual |
| Peranti pengedap menegak | |
| Struktur | menegak memaparkan penekan besi, pemasangan penyejukan struktur penekan spring |
| Pandu | mesin utama memacu rod gandingan mekanisme eksentrik untuk melakukan pergerakan menegak |
| Kuantiti | 4 pasukan dalam pengedap haba, 4 pasukan dalam penyejukan |
| Panjang | 700mm |
| Peranti zip menegak B | |
| Struktur | paparan menegak penekan besi, struktur penekan spring pemasangan penyejukan, pisau pengedap bawah; pemegang seterika haba pneumatik bergerak ke bawah apabila mesin dihentikan. Tetapkan semula automatik apabila mesin dihidupkan. |
| Pandu | mesin utama memacu rod gandingan mekanisme eksentrik untuk melakukan pergerakan menegak |
| Kuantiti | 2 pasukan dalam pengedap haba, 2 pasukan dalam penyejukan |
| Peranti pengedap mendatar | |
| Struktur | struktur spring pemasangan tekan besi yang memaparkan mendatar, pemasangan penyejukan |
| Pandu | mesin utama memacu rod gandingan mekanisme eksentrik untuk melakukan pergerakan menegak |
| Kuantiti | tiga pasukan mengenai pengedap haba, dua pasukan mengenai penyejukan |
| Panjang | 640mm |
| B Peranti perataan mendatar (zip tepi perataan haba) | |
| Struktur | struktur spring pemasangan tekan besi paparan mendatar |
| Pandu | sama seperti pengedap mendatar |
| Kuantiti | 2 set untuk menekan haba |
| Peranti Pemakanan Filem | |
| Struktur | jenis geseran menekan penggelek getah |
| Pandu | servomekanisme pengeluaran larian digital sepenuhnya yang diimport (Panasonic, Jepun) |
| Penularan | jalur dan roda segerak |
| Mod kawalan | kawalan PLC berpusat, penetapan panjang segerak dan kawalan tegangan tengah |
| Tegangan pusat | |
| Struktur | struktur gulungan tegangan terapung |
| Mod kawalan | kawalan PLC berpusat |
| Mekanisme kawalan | Trend pelengkap pergerakan penggelek tegangan terapung mengawal panjang langkah servo tengah untuk mencapai berhenti dan mula pada masa yang sama |
| Mod ujian | suis pendekatan elektromagnetisme (NPN) |
| Julat pelarasan ketegangan | 0.1-0.2mm (tetapan komputer, pampasan automatik) |
| Peranti penghantaran utama | |
| Struktur | struktur rod gandingan tolak dan tarik rocker engkol |
| Pandu | Motor servo Panasonic 3KW. |
| Penularan | pengurang jalur jentera elektrik penghantaran utama 1:10 |
| Modaliti kawalan | kawalan PLC berpusat |
| Mod larian | motor utama yang menjalankan pemacu rangka untuk melakukan pergerakan menegak |
| Peranti kedudukan automatik | |
| Mod ujian | ujian pengesanan sensor fotoelektrik pantulan |
| Ketepatan ujian | 0.01- 0.25mm |
| Ketepatan kedudukan bersepadu | ≤0.5-1mm |
| Julat pencarian fotoelektrik | ±3mm |
| Membetulkan julat penyamaan | ±3mm |
| Pembetulan kedudukan dengan bijak | servo menjejaki penyamaan arus, sistem pembetulan pergerakan automatik fotoelektrik |
| Tetapan kawalan suhu | |
| Mod ujian | ujian pasangan termo |
| Mod kawalan | Kawalan PLC berpusat, pelarasan PID, geganti keadaan pepejal |
| Julat tetapan suhu | biasa -360℃ |
| Titik ujian suhu | bahagian tengah dipanaskan elektrik |
| Pisau pemotong berganda (Pemotongan berganda boleh alih) | |
| Struktur | pisau pemotong atas + peralatan pelarasan + pisau pemotong bawah tetap |
| Mod | pisau ricih musim bunga |
| Penularan | pemacu motor utama, mekanisme eksentrik gerakan ke atas dan ke bawah. |
| Pelarasan | pergerakan mendatar (dua hujung) |
| Peranti beg berdiri |
| Sistem relaksasi segerak automatik, pelarasan bebas ketegangan relaksasi, lipatan tepi tripod. |
| Peranti penyumbat lubang bulat automatik dan kedudukan yang tepat. |
| Peranti buka zip automatik |
| Pemakanan motor pengurangan kelajuan kotak gear tunggal yang bebas |
| Pelarasan fotoelektrik automatik yang memastikan kelajuan segerak dengan motor utama |
| Peranti penebuk (menggunakan bahagian yang diimport) | |
| Struktur | struktur impak model utama utama enjin pneumatik sokongan melengkung |
| Mod kawalan | kawalan PLC berpusat |
| Pandu | Relay keadaan pepejal memacu nilai solenoid |
| Kuantiti pendirian tebukan | dua pasukan asas (rombus) |
| Silinder udara | Airtac, Taiwan |
| Peranti pisau kimpalan | |
| Mendatar: | Radiks 20mm*2; Radiks 30mm*2; Radiks 40mm*2; Radiks 50mm*2 |
| Undur tepi | |
| Bekalan kuasa | tiga fasa 380V, ±10%, 50HZ lima talian |
| Kelantangan | 45KW |
| Bekalan udara | tekanan ≥ 0.6Mpa |
| Air penyejuk | 3 L/min |